
When using a disciplined clock (GNSS disciplined for instance), two modes of operation are of importance.
Disciplined Mode
When the pilot is disciplined, the quality of the algorithm used and the pilot stability characteristics will determine the overall clock stability performance.
The short term stability will be driven by the pilot characteristics while the long term stability will be maintained below a value defined within the algorithm whatever the duration.
Free Running Mode
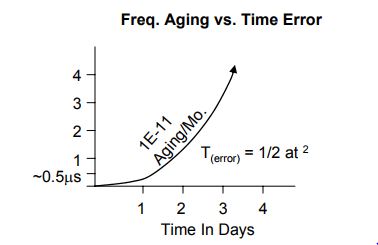
When the pilot is not disciplined anymore, the pilot will drift by its own stability performance.
In that case : ∆Τ = ½ *a * t² (without taking into account noises)
where ∆Τ = Time Error, a = aging, t = Elapsed Time
To calculate the time error over a duration, the frequency aging or long term stability to be considered must be the one matching the requested duration.
Exemple
To calculate a time error over 20 days, one must consider the 1 month stability of the pilot.
So for a pilot featuring a 1 month stablity of 1E-11, its accuracy over 1 second is 1e-11/(30*24*3600)=3,85e-18.
Time Error = ½ * 3,85e-18 * (20/30 * 24 * 3600)² = 5,76μs.
Depending on the requested Time error, Timelink can adjust any product to various pilots within TCXO, OCXO, Rubidium, Cesium : Contact.